























Fictron Industrial Supplies Sdn Bhd
No. 7 & 7A,
Jalan Tiara, Tiara Square,
Taman Perindustrian Sime UEP,
47600 Subang Jaya,
Selangor, Malaysia.
No. 7 & 7A,
Jalan Tiara, Tiara Square,
Taman Perindustrian Sime UEP,
47600 Subang Jaya,
Selangor, Malaysia.
+603-8023 9829
+603-8023 7089
Fictron Industrial
Automation Pte Ltd
140 Paya Lebar Road, #03-01,
AZ @ Paya Lebar 409015,
Singapore.
+65 31388976
sg.sales@fictron.com
Automation Pte Ltd
140 Paya Lebar Road, #03-01,
AZ @ Paya Lebar 409015,
Singapore.
+65 31388976
sg.sales@fictron.com
Swarm Robots Mimic Ant Jaws to Flip and Jump
18 Jul 2019

View Full Size
Small robots are appealing because they’re simple, cheap, and it’s easy to make a lot of them. Unfortunately, being simple and cheap means that each robot separately can’t do a whole lot. To make up for this, you can do what insects do—leverage that ease and low-cost to just make a huge swarm of simple robots, and together, they can cooperate to carry out relatively complex tasks.
Using pests as an illustration does set a bit of an unjust expectancy for the poor robots, since insects are (let’s be honest) generally smarter and much more adaptable than a robot on their scale could ever hope to be. Most robots with insect-like capabilities (like DASH and its family) are really too big and complex to be turned into swarms, because to make a vast amount of small robots, things like motors aren’t going to work because they’re too expensive.
The query, then, is to how to make a swarm of cheap small robots with insect-like mobility that don’t need motors to get around, and Jamie Paik’s Reconfigurable Robotics Lab at EPFL has an answer, motivated by trap-jaw ants.
Let’s talk about trap-jaw ants for just a second, because they’re crazy. You can understand this 2006 paper about them if you’re specifically curious in insane ants (and who isn’t!), but if you just want to hear the insane bit, it’s that trap-jaw ants can fire themselves into the air by biting the ground (!). In just 0.06 millisecond, their half-millimeter long mandibles can close at a top speed of 64 meters per second, which works out to an acceleration of about 100,000 g’s. Biting the ground causes the ant’s head to snap back with a force of 300 times the body weight of the ant itself, which launches the ant upwards. The ants can fly 8 centimeters vertically, and up to 15 cm horizontally—this is a lot, for an ant that’s just a few millimeters long.
Trap-jaw ants can fire independently into the air by biting the ground, causing the ant’s head to snap back with a force of 300 times the body weight of the ant itself
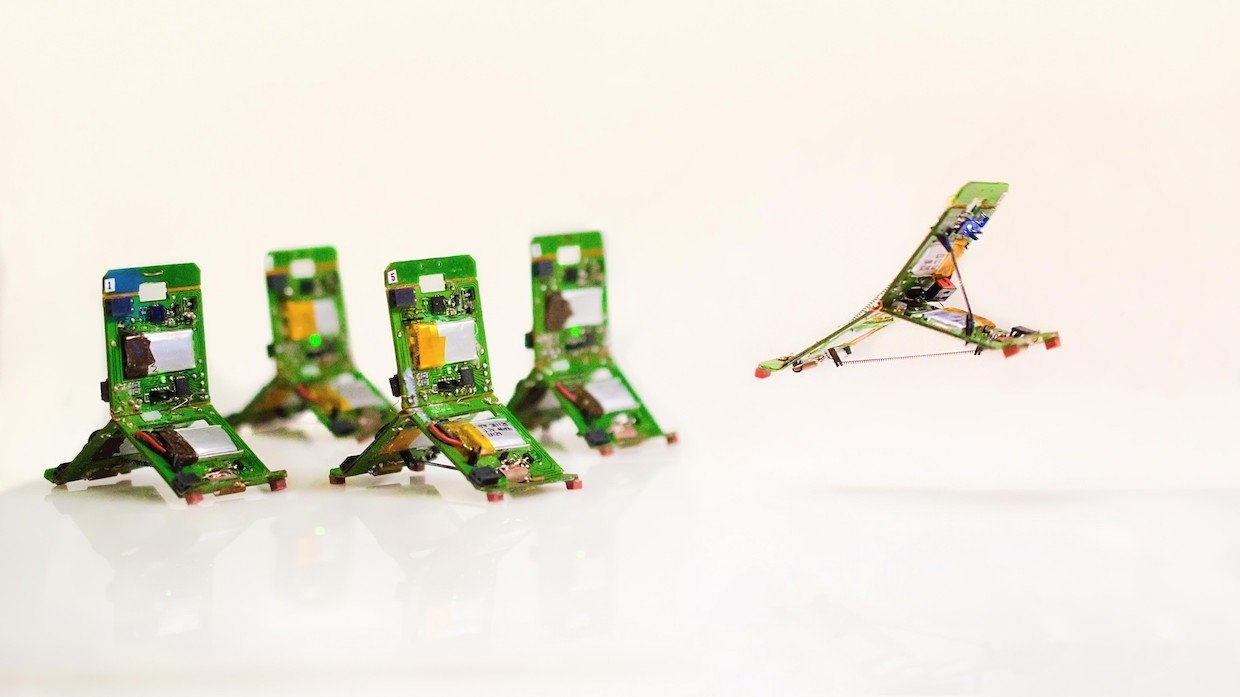
EPFL’s robots, also known as Tribots, look practically nothing at all like trap-jaw ants, which for me I am fine with. They’re about 5 cm tall, weighing 10 grams each, and can be built on a flat sheet, and then folded into a tripod shape, origami-style. Or maybe it’s kirigami, because there’s some cutting involved. The Tribots are fully autonomous, meaning they have onboard power and control, including proximity sensors that allow them to detect objects and avoid them.
Staying away from objects is where the trap-jaw ants come in. Using two unique shape-memory actuators (a spring and a latch, similar to how the ant’s jaw works), the Tribots can move around using a bunch of different methods that can adapt to the terrain that they’re on, including:
Vertical jumping for height
Horizontal jumping for distance
Somersault jumping to clear obstacles
Walking on textured terrain with short hops (called 'flic-flac' walking)
Crawling on flat surfaces
Tribot’s maximum vertical dive is 14 cm (2.5 times its height), and horizontally it can jump about 23 cm (almost 4 times its length). Tribot is actually quite reliable in these movements, with a cost of transport much lower than similarly-sized robots, on par with insects themselves.
Working together, small groups of Tribots can complete tasks that a single robot couldn’t do alone. One instance is pushing a heavy object a set distance. It turns out that you need five Tribots for this task—a leader robot, two worker robots, a monitor robot to evaluate the distance that the object has been pushed, and then a messenger robot to relay communications around the obstacle.
The researchers know that the current version of the hardware is minimal in pretty much every way (mobility, sensing, and computation), but it does a practical job of representing what’s possible with the idea. The plan going ahead is to speed up manufacturing in order to 'enable on-demand, ’push-button-manufactured’' robots.
This article is originally posted on Tronserve.com
Using pests as an illustration does set a bit of an unjust expectancy for the poor robots, since insects are (let’s be honest) generally smarter and much more adaptable than a robot on their scale could ever hope to be. Most robots with insect-like capabilities (like DASH and its family) are really too big and complex to be turned into swarms, because to make a vast amount of small robots, things like motors aren’t going to work because they’re too expensive.
The query, then, is to how to make a swarm of cheap small robots with insect-like mobility that don’t need motors to get around, and Jamie Paik’s Reconfigurable Robotics Lab at EPFL has an answer, motivated by trap-jaw ants.
Let’s talk about trap-jaw ants for just a second, because they’re crazy. You can understand this 2006 paper about them if you’re specifically curious in insane ants (and who isn’t!), but if you just want to hear the insane bit, it’s that trap-jaw ants can fire themselves into the air by biting the ground (!). In just 0.06 millisecond, their half-millimeter long mandibles can close at a top speed of 64 meters per second, which works out to an acceleration of about 100,000 g’s. Biting the ground causes the ant’s head to snap back with a force of 300 times the body weight of the ant itself, which launches the ant upwards. The ants can fly 8 centimeters vertically, and up to 15 cm horizontally—this is a lot, for an ant that’s just a few millimeters long.
Trap-jaw ants can fire independently into the air by biting the ground, causing the ant’s head to snap back with a force of 300 times the body weight of the ant itself
EPFL’s robots, also known as Tribots, look practically nothing at all like trap-jaw ants, which for me I am fine with. They’re about 5 cm tall, weighing 10 grams each, and can be built on a flat sheet, and then folded into a tripod shape, origami-style. Or maybe it’s kirigami, because there’s some cutting involved. The Tribots are fully autonomous, meaning they have onboard power and control, including proximity sensors that allow them to detect objects and avoid them.
Staying away from objects is where the trap-jaw ants come in. Using two unique shape-memory actuators (a spring and a latch, similar to how the ant’s jaw works), the Tribots can move around using a bunch of different methods that can adapt to the terrain that they’re on, including:
Vertical jumping for height
Horizontal jumping for distance
Somersault jumping to clear obstacles
Walking on textured terrain with short hops (called 'flic-flac' walking)
Crawling on flat surfaces
Tribot’s maximum vertical dive is 14 cm (2.5 times its height), and horizontally it can jump about 23 cm (almost 4 times its length). Tribot is actually quite reliable in these movements, with a cost of transport much lower than similarly-sized robots, on par with insects themselves.
Working together, small groups of Tribots can complete tasks that a single robot couldn’t do alone. One instance is pushing a heavy object a set distance. It turns out that you need five Tribots for this task—a leader robot, two worker robots, a monitor robot to evaluate the distance that the object has been pushed, and then a messenger robot to relay communications around the obstacle.
The researchers know that the current version of the hardware is minimal in pretty much every way (mobility, sensing, and computation), but it does a practical job of representing what’s possible with the idea. The plan going ahead is to speed up manufacturing in order to 'enable on-demand, ’push-button-manufactured’' robots.
This article is originally posted on Tronserve.com